iSWV集成轮式减速电机
高度集成化:将驱动器、电机、减速机集成为模组型式,结构紧凑,有利于整机进行高度控制;
可靠性高:集成化模组,外部只有电源与通讯线缆,抗干扰能力强,有利于提高整车的稳定性以及可靠性;
开放设计:行走与旋转模组可单独售卖,客户可根据自己的车体进行整模组设计,可塑性强;
维护性好:集成化产品单一供应商,有利于后期产品维护,降低供应链、售后成本;
应用场景:轮式人形机器人、服务机器人、复合机器人
| 参数规格 | ||||
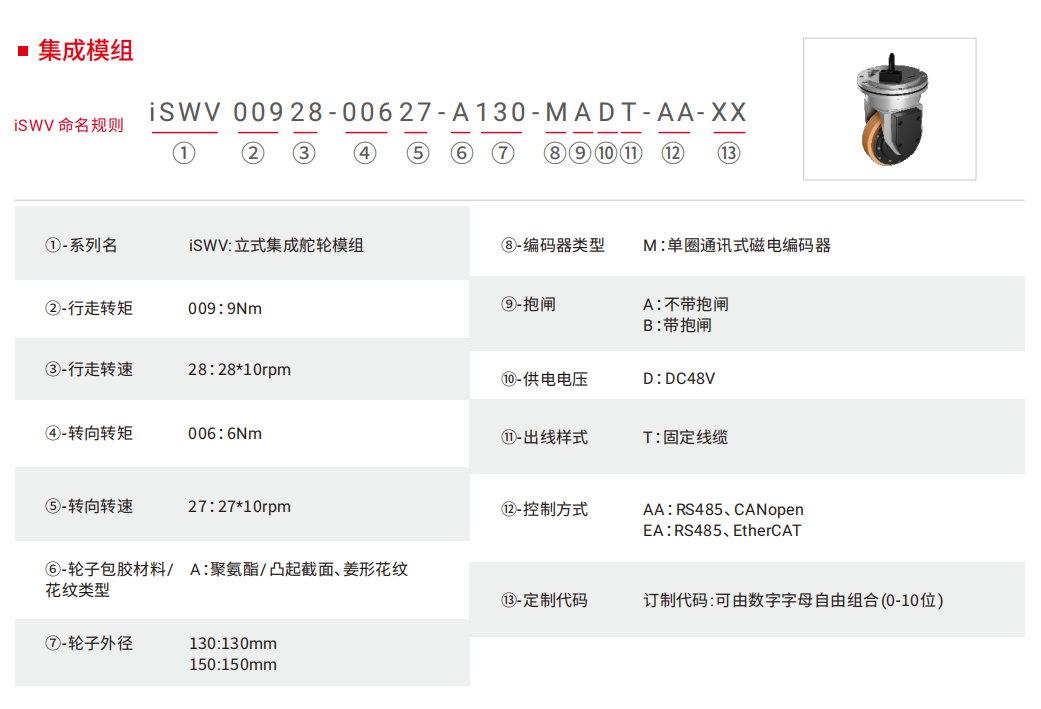
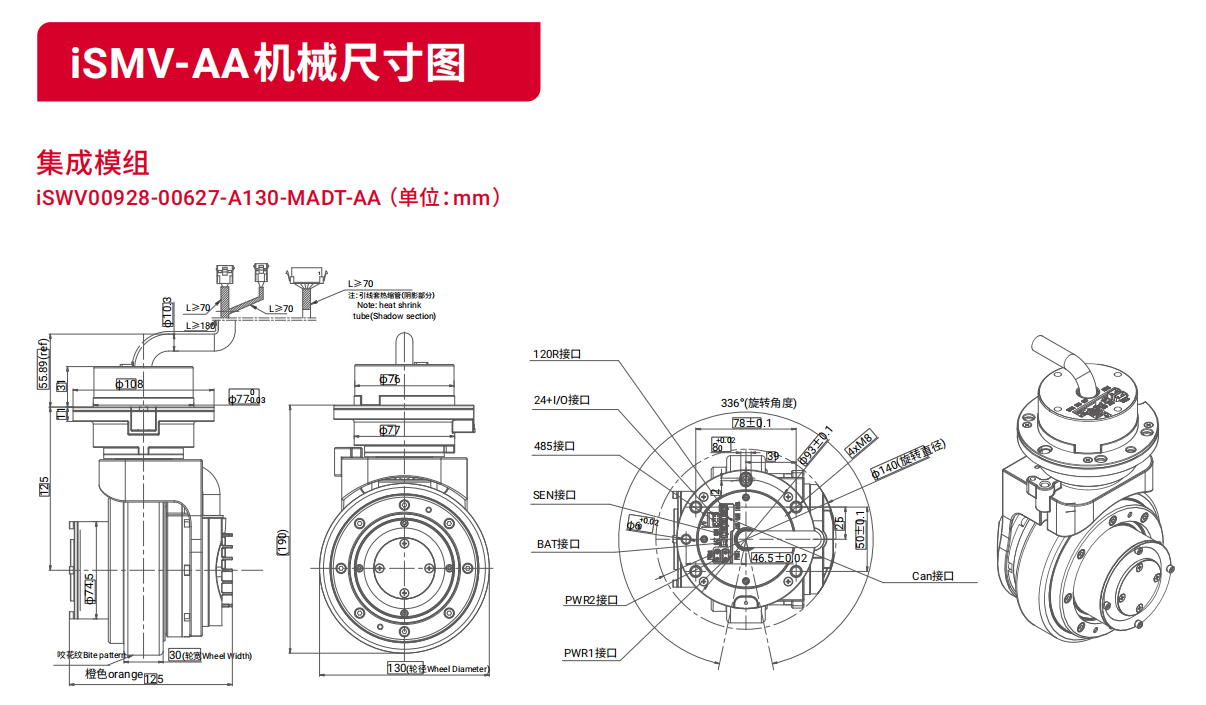
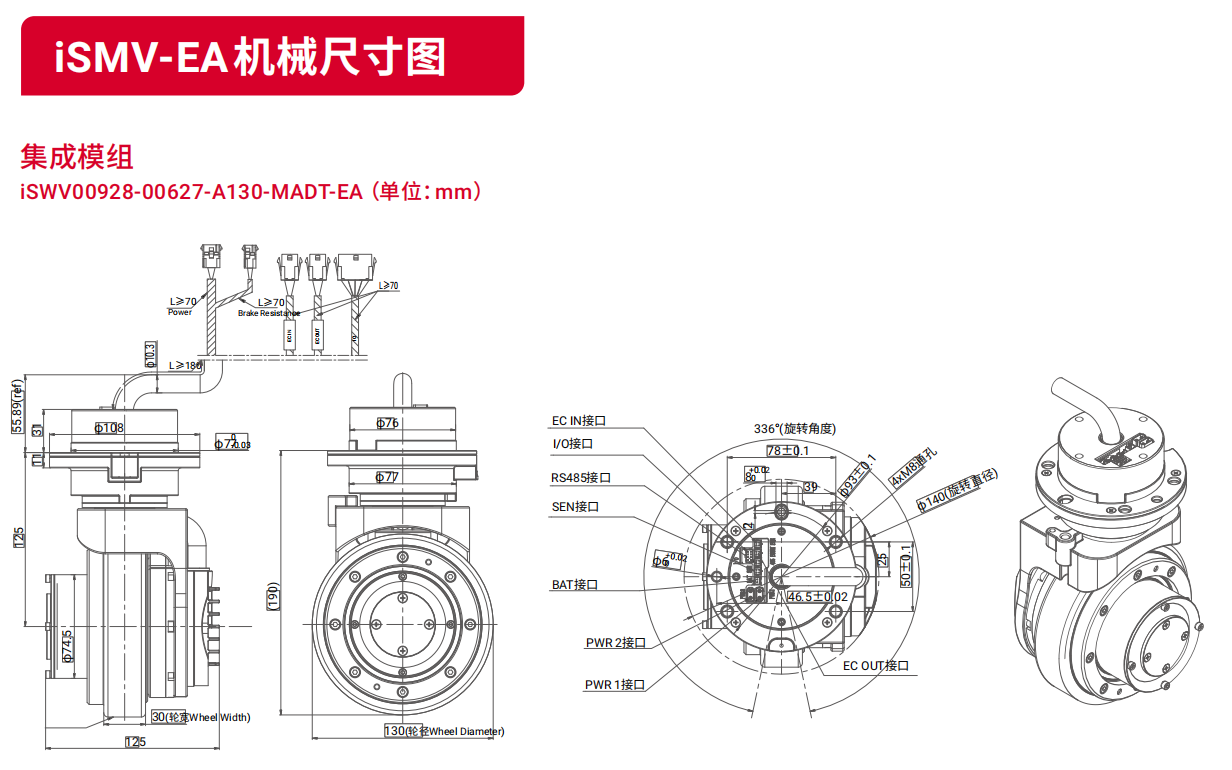
| (集成模组)规格型号 | iSWV00928-00627-A130-MADT-□A | iSWV00928-00627-A150-MBDT-□A | ||
| 动力电源(VDC) | 48V | 48V | ||
| 逻辑电源(VDC) | 24V,0.5A(可选) | 24V,0.5A(可选) | ||
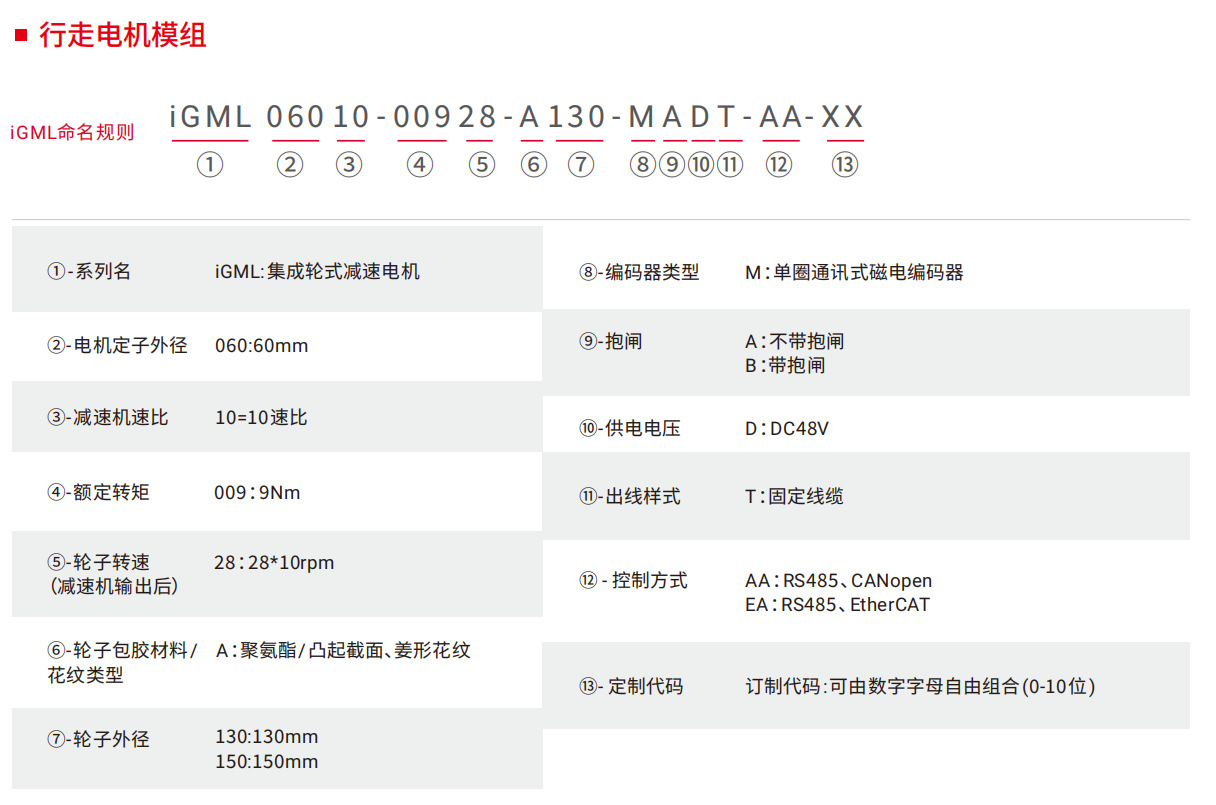
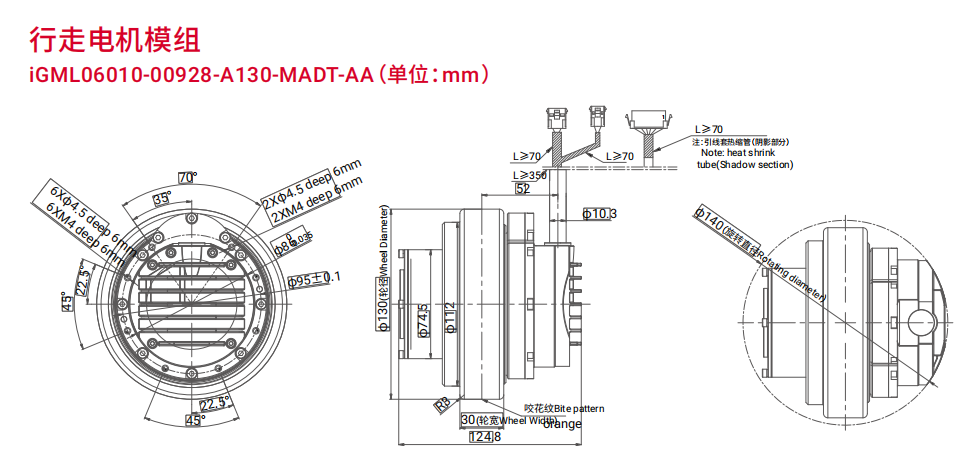
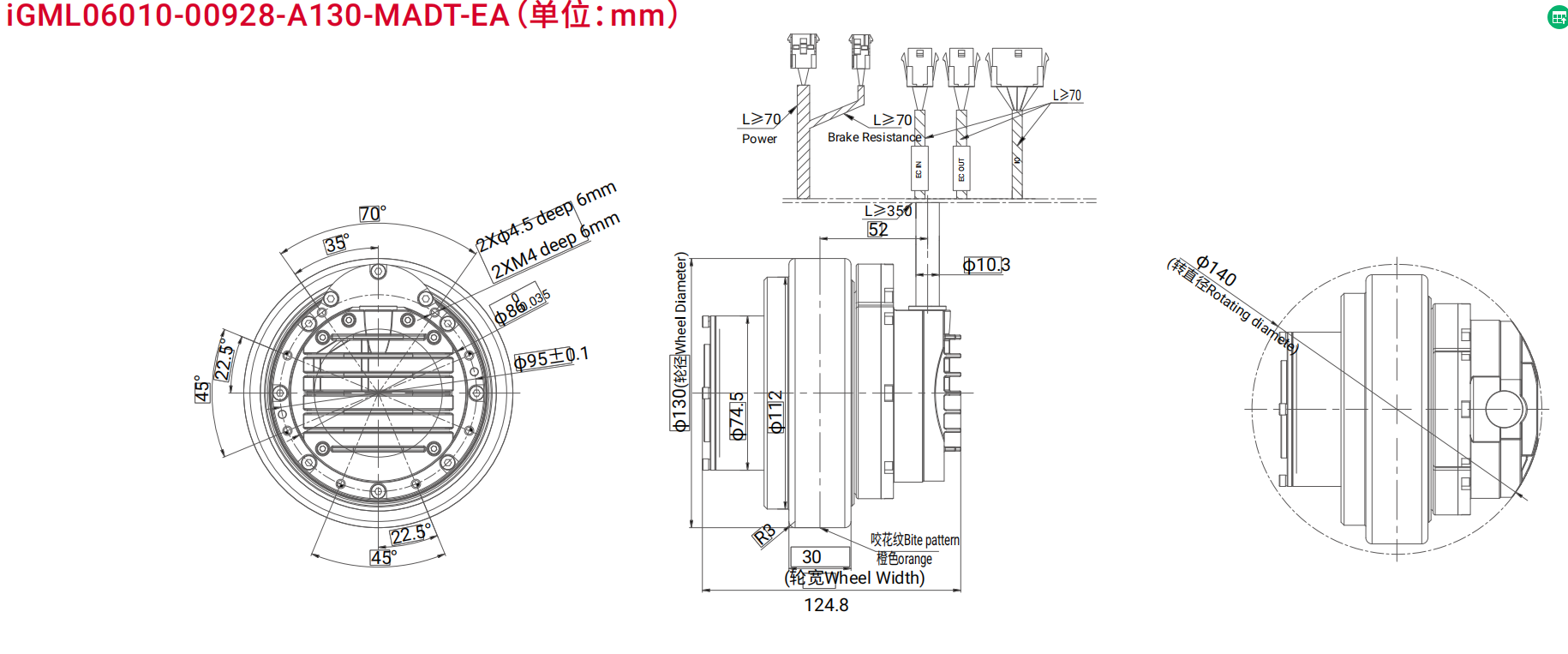
| 行走电机模组 | 规格型号 | iGML06010-00928-A130-MADT-□A | iGML06010-00928-A150-MBDT-□A | |
| 行走一体机性能参数 | ||||
| 额定功率(W) | 294 | 294 | ||
| 额定电流(A) | 8.5 | 8.5 | ||
| 额定转矩(N.m) | 1 | 1 | ||
| 额定转速(rpm) | 2800 | 2800 | ||
| 最大电流(Arms) | 25 | 26 | ||
| 抱闸保持扭矩 T(Nm) | / | 1.32 | ||
| 行走减速一体机性能参数 | ||||
| 额定转矩(N.m) | 9 | 9 | ||
| 额定转速(rpm) | 280 | 280 | ||
| 额定功率(W) | 264 | 264 | ||
| 轮径(mm) | 130 | 150 | ||
| 轮宽(mm) | 30 | 45 | ||
| 额定线速度(m/s) | 1.9 | 2.2 | ||
| 最大线速度(m/s) | 2.2 | 2.5 | ||
| 重量(kg) | 3.2(REF) | 5.1 | ||
| 绝缘等级 | F | F | ||
| 防护等级 | IP54 | IP54 | ||
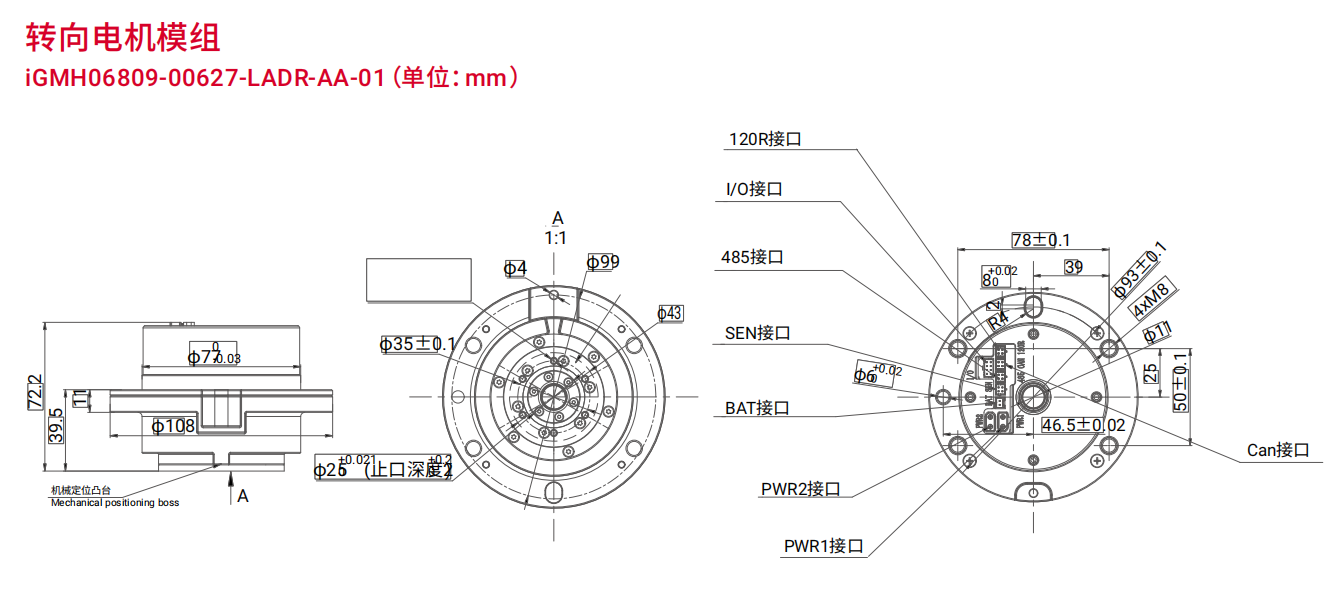
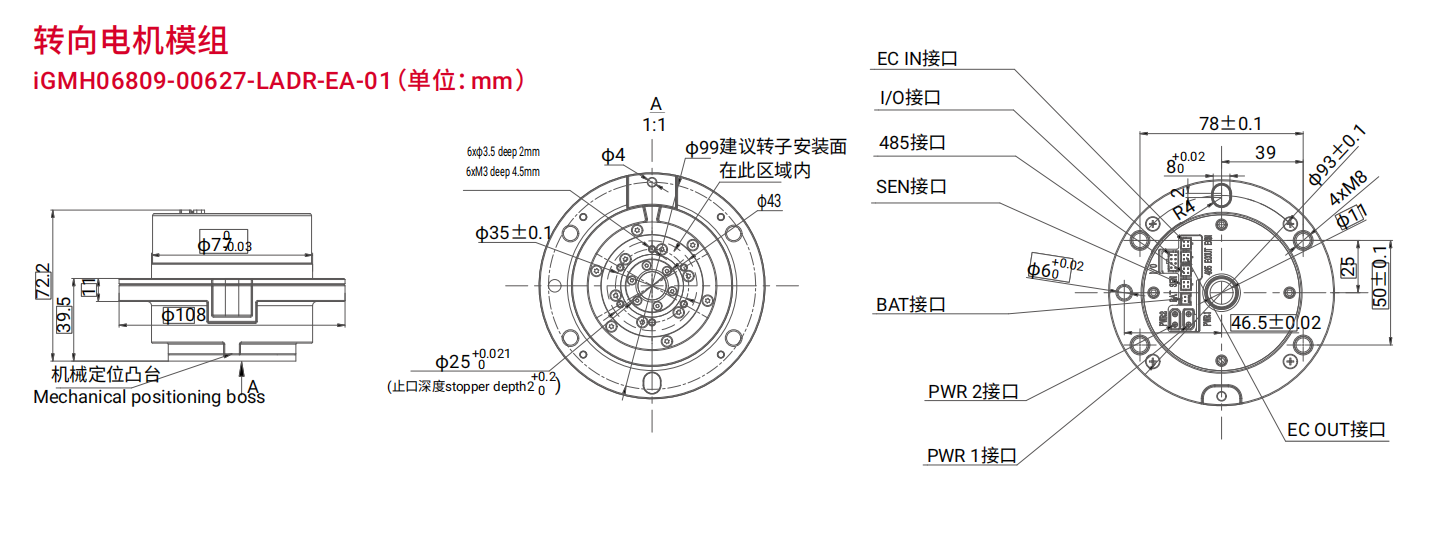
| 转向电机模组 | 规格型号 | iGMH06809-00627-LADR-□A-01 | iGMH06809-00627-LADR-□A-01-01 | |
| 旋转减速一体机性能参数 | ||||
| 额定转矩(N.m) | 6 | 6 | ||
| 额定转速(rpm) | 277 | 277 | ||
| 额定功率(rpm) | 174 | 174 | ||
| 最大转矩(N.m) | 13.5 | 13.5 | ||
| 最大转速(rpm) | 330 | 330 | ||
| 重量(kg) | 1(REF) | 1.4 | ||
| 绝缘等级 | F | F | ||
| 防护等级 | IP20 | IP20 | ||
| 整机参数 | ||||
| 整机重量(kg) | 5(REF) | 7.5 | ||
| 轮胎材质 | 聚氨酯 | 聚氨酯 | ||
| 轮胎硬度等级 | 85A±2 | 90A±2 | ||
| 工作制 | S3-10min-60%(周期10min,60%工作时间) | S3-10min-60%(周期10min,60%工作时间) | ||
| 承载重量(kg) | 最大100kg | 最大150kg | ||
| 集成模组 | 能耗制动 | 行走模组内部含制动电路 | ||
| 过压报警电压(V) | 默认68±2V | |||
| 欠压报警电压(V) | 默认18±2V | |||
| Modbus/RS485 | 最大支持115.2Kbps波特率,可使用Modbus RTU协议与控制器通讯 | |||
| CANopen | 最大支持1Mbps波特率,可使用CANopen协议与控制器通讯 | |||
| EtherCAT | 支持COE(CiA402协议)以及CSP/CSV/PP/PV/PT/HM模式,通讯速度100M | |||
| 环境要求 | 工作环境温度:0℃~40℃;存储温度:20℃~60℃; 使用和存储均为≤90%RH,无结露;聚氨酯胎面要求平整路面且无异物 |
|||
| 注:=A:RS485、CANopen E:RS485、EtherCAT |
||||
| 产品名称 | 行走模组 | 中空转向模组 |
| 规格型号 | IGML06010 - 00928 - A130 - MADT - XX | IGMH06809 - 00627 - LADR - XX |
| 动力电源 | 24VDC~60VDC | 24VDC~60VDC |
| 逻辑电源 | 24VDC | 24VDC |
| 额定功率Pn(W) | 294 | 195 |
| 额定转矩Tn(Nm) | 9 | 6 |
| 额定转速Nn(rpm) | 280 | 277 |
| 最大转矩Tm(Nm) | 27 | 13.5 |
| 最大转速(rpm) | 330 | 330 |
| 额定线速度(m/s) | 1.9 | / |
| 轮径(mm) | 130 | / |
| 轮宽(mm) | 30 | / |
| 最大径向力N | 1500 | 1500 |
| 最大轴向力N | 800 | 1500 |
| 防护等级 | IP54 | IP20 |
| 能耗制动 | 行走模组内部含制动电路 | 行走模组内部含制动电路 |
| 过压报警电压 | 默认68±2V | 默认68±2V |
| 欠压报警电压 | 默认18±2V | 默认18±2V |
| Modbus/RS485 | 最大支持115.2Kbps波特率,可使用Modbus RTU协议与控制器通讯 | 最大支持115.2Kbps波特率,可使用Modbus RTU协议与控制器通讯 |
| CANopen | 最大支持1Mbps波特率,可使用CANopen协议与控制器通讯 | 最大支持1Mbps波特率,可使用CANopen协议与控制器通讯 |
| EtherCAT | 支持COE(CANopen 协议)以及CSP/CSV/SP/PP/PT/PM模式,通讯速度100M | 支持COE(CANopen 协议)以及CSP/CSV/SP/PP/PT/PM模式,通讯速度100M |
轮式⼈形机器⼈、服务机器⼈、复合机器⼈
产品特点
- 高度集成化:将驱动器、电机、减速机集成为模组型式,结构紧凑,有利于整机进行高度控制;
- 可靠性高:集成化模组,外部只有电源与通讯线缆,抗干扰能力强,有利于提高整车的稳定性以及可靠性;
- 开放设计:行走与旋转模组可单独售卖,客户可根据自己的车体进行整模组设计,可塑性强;
- 维护性好:集成化产品单一供应商,有利于后期产品维护,降低供应链、售后成本;
- 应用场景:轮式人形机器人、服务机器人、复合机器人