MELSEC iQ-F系列
只需简单设置实现的运动控制
先进的运动性能包装在紧凑模块中。
| 运动模块 | |||
| 项目 | 规格 | ||
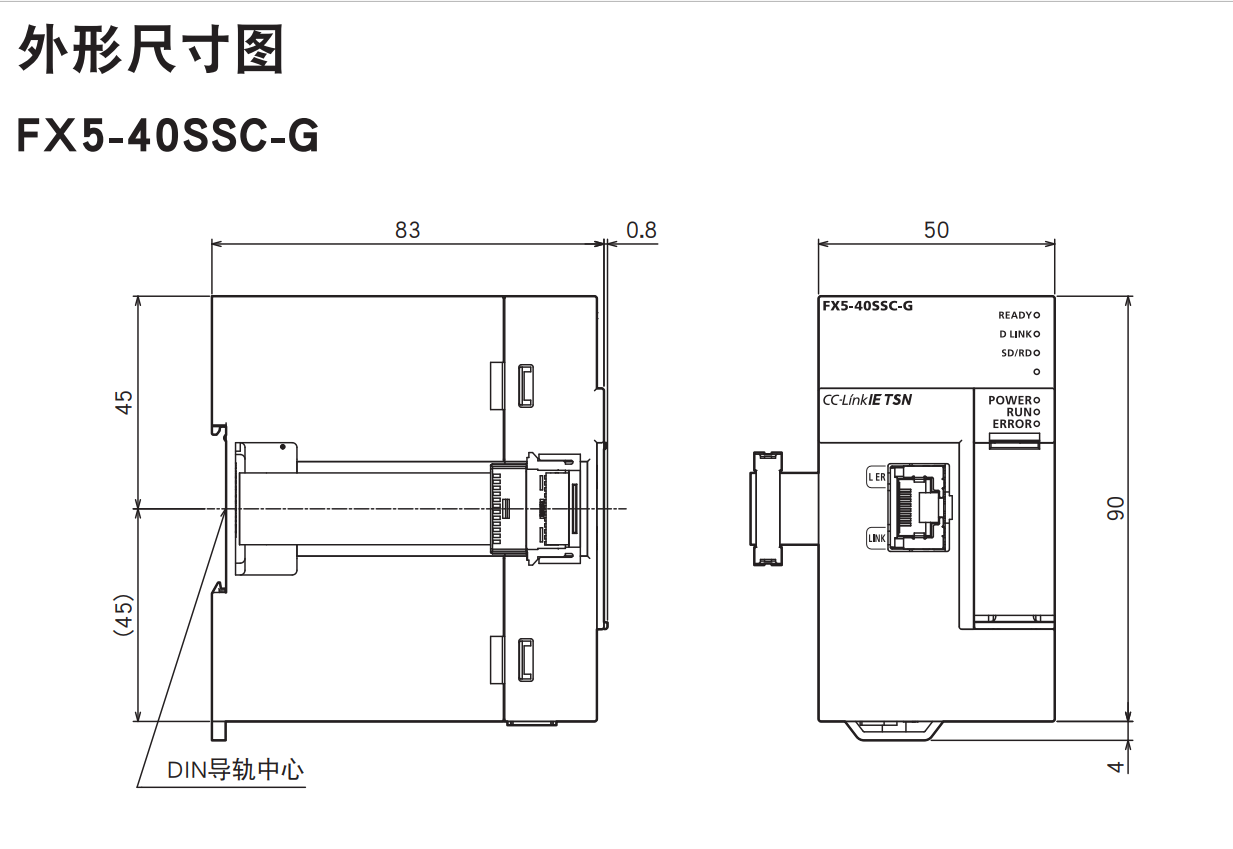
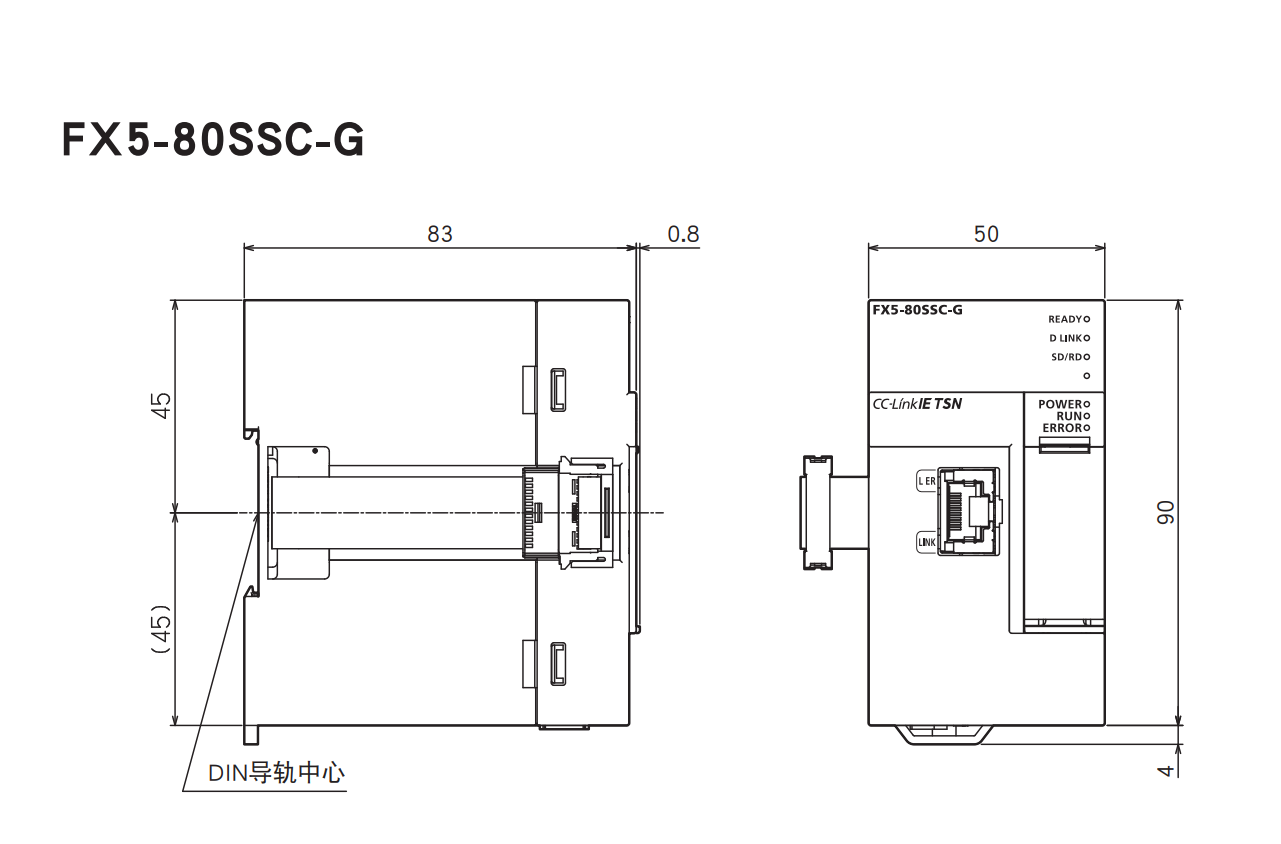
| FX5-40SSC-G | FX5-80SSC-G | ||
| 控制轴数 | 4轴 | 8轴 | |
| 运算周期 (运算周期设定) | 500,100,020,004,000 | ||
| 插补功能 | 直线插补(多4轴)、2轴圆弧插补 | ||
| 控制方式 | 定位控制、轨迹控制(直线、圆弧皆可设定)、速度控制、速度和转矩控制、同步控制、推压控制 | ||
| 补偿功能 | 齿隙补偿、电子齿轮、近旁通过 | ||
| 同步控制 | 同步编码器输入、指令生成轴、凸轮、相位补偿、凸轮自动生成 | ||
| 凸轮控制 | 凸轮登录数 | 128个 | |
| 凸轮数据形式 | 行程比数据形式、坐标数据形式 | ||
| 凸轮自动生成 | 旋切设备用凸轮自动生成 | ||
| 定位控制方式 | 点位表方式 | ||
| 控制单位 | mm, inch, degree, pulse | ||
| 定位数据数 | 600个数据(定位数据No.1~600)轴(也可在MELSOFT GX Works3、顺控程序上设定) | ||
| 备份 | 参数、定位数据、块启动数据可以通过闪存ROM保存(无需电池) | ||
| 复位 | 驱动器复位式 | ||
| 定位控制 | 直线插补控制(4轴、(合成速度、标准轴速度))、定长进给控制(4轴)、2轴圆弧插补控制(辅助点)、速度控制4轴)、速度/位置切换 控制(INC模式、ABS模式),位置/速度切换控制(INC模式)、当前值更改(定位数据、当前值更改用启动编号)NOP命令、JUMP命令(附带条件、无条件)、LOOP 、LEND、定位(块启动、条件启动、等待启动、同时启动、重复启动) |
||
| 手动控制 | JoG运行、微动运行、手动脉冲器运行(可以连接1台(增量式)、单位倍数: 1~10000倍、经由CPU(缓冲储存器)) | ||
| 速度和转矩控制 | 不含位置环的速度控制、转矩控制、推压控制 | ||
| 位置系统 | 有 | ||
| 同步编码器运行功能 | 可以使用4台(经由伺服放大器、经由CPU) | ||
| 速度 | 速度值、JOG速度值 | ||
| 转矩功能 | 转矩值同一、转矩值个别 | ||
| 紧急停止 | 经由缓冲储存器、具有有效/无效的切换功能 | ||
| 软件行程限位功能 | 进给当前值的可动范围检测、进给机械值的可动范围检测 | ||
| 硬件行程限位功能 | 有 | ||
| 速度更改 | 有 | ||
| 超驰功能 | 1~300 | ||
| 加减速处理更改 | 加减速时间 | ||
| 转矩值更改 | 有 | ||
| 目标位置更改 | 目标位置的地址、向目标位置的移动速度可以更改 | ||
| M代码输出功能 | 有 | ||
| 其他功能 | 步进功能 | 减速单位步进、数据no、单位步进 | |
| 跳过功能 | 经由CPU经由外部指令信号 | ||
| 参数初始化功能 | 有 | ||
| 外部输入信号设定功能 | 经由CPU经由伺服放大器 | ||
| 色标检测功能 | 常时检测模式、次数模式、环形缓冲模式 | ||
| 色标检测信号 | 伺服放大器的控制轴数份 | ||
| 色标检测设定 | 16设定 | ||
| 任意数据监视功能 | 4点/轴 | ||
| 自动恢复连接 | 有 | ||
| 数字示波器功能 | 位数据16CH、字数据16CH | ||
| CC-Link IE TSN网络规格 | ||
| 项目 | 规格 | |
| FX5-40SSC-G | FX5-80SSC-G | |
| 通信速度 | 1G | |
| 一个网络的连接站数 | 运动管理站: 4站常规站: 16站 | 运动管理站: 8站常规站: 16站 |
| 连接电缆 | Ethermet电缆(5e类以上,带双层、STP)直通电缆 | |
| 站间距离 | 100 | |
| 网络数 | 239 | |
| 拓扑结构 | 线型、星型、线型 +星型 | |
| 通信方式 | 时间分割方式 | |
| 瞬时传送容量 | 1920字节 | |
| 每个网络的链接点数 | ||
| RX/RY | 8192点、1 K字节(主站时) | |
| RWr/RWw | 1024点、2 K字节(主站时) | |
| 每个站的链接点数 | ||
| RX/RY | 8192点、1 K字节(主站时) | |
| RWr/RWw | 1024点、2 K字节(主站时) | |
| 控制规格 | |||
| 项目 | 规格 | ||
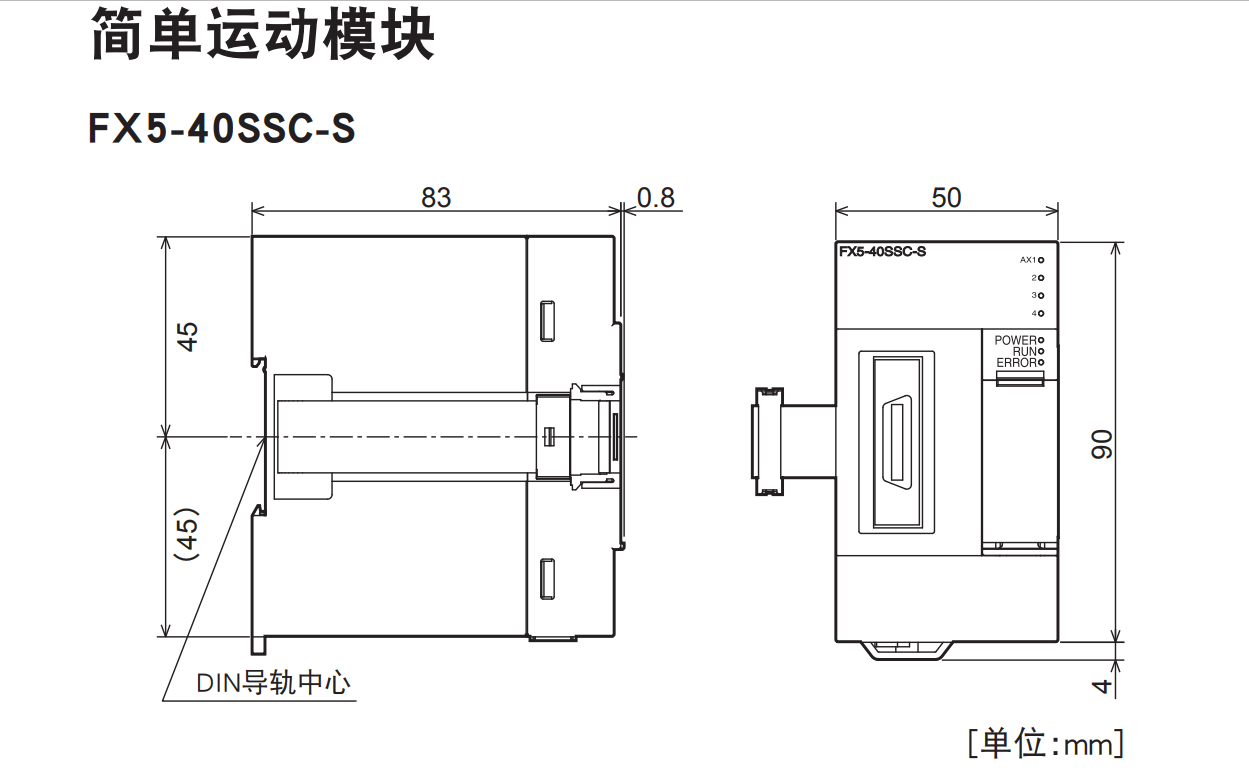
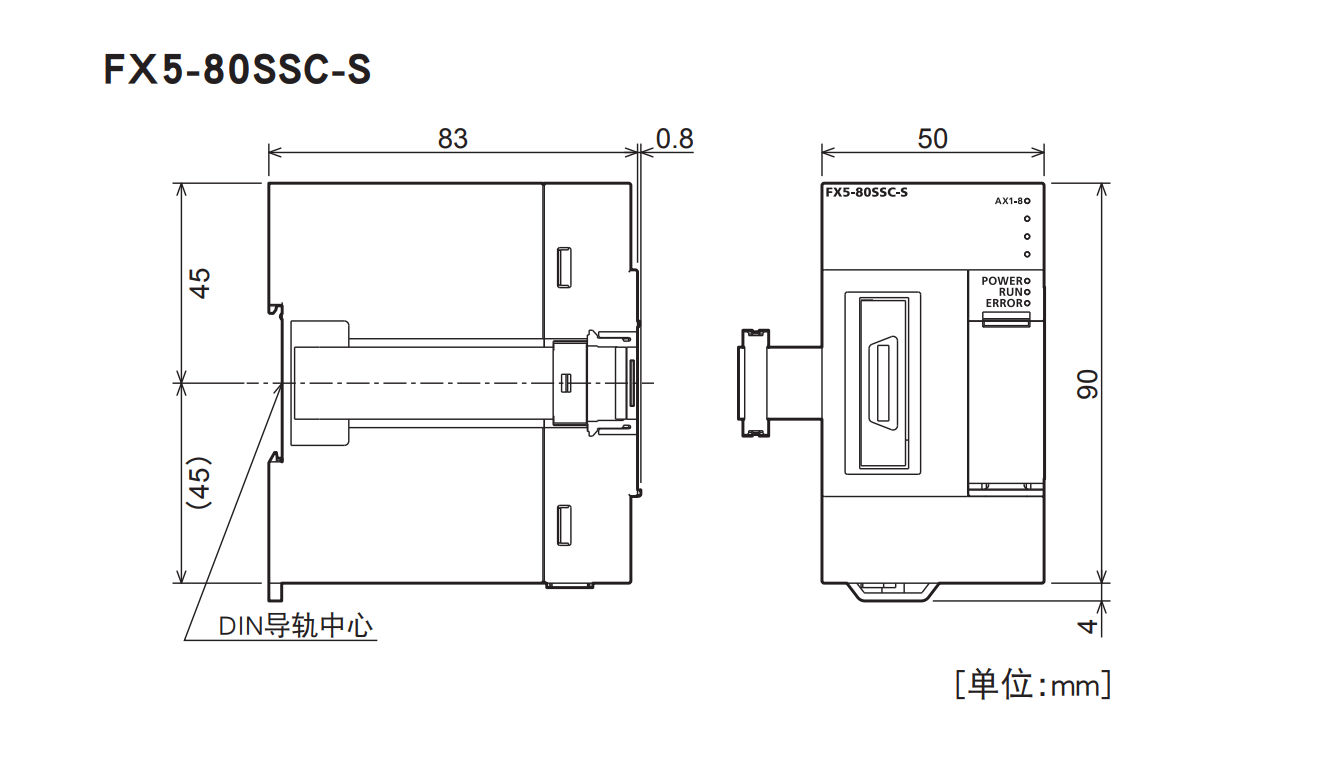
| FX5-40SSC-S | FX5-80SSC-S | ||
| 控制轴数 | 4轴 | 8轴 | |
| 运算周期(运算周期设定)[me] | 0.888、1.777 | ||
| 插补功能 | 直线插补(轴圆弧插补 | ||
| 加减速处理 | 梯形加减速,字加减速 | ||
| 补偿功能 | 电子齿轮,间隙,近旁通过 | ||
| 同步控制 | 输入轴 | 伺服输入轴,同步编码轴,指令生成车轴 | |
| 输出轴 | 凸轮轴 | ||
| 凸轮控制 | 凸轮登记数 | 64个 | 128个 |
| 凸轮数据格式 | 行程比数据格式,坐标数据格式 | ||
| 凸轮自动生成 | 旋切设备用凸轮自动生成 | ||
| 控制单位 | mm, inch, degree, pulse | ||
| 定位数据数 | 600个数据(定位数据No.1~600)/ | ||
| 备份 | 参数,定位数据,块启动数据可以通过快闪ROM保存(无需电池) | ||
| 复位 | 复位方式 | 近点狗式计数式,计数式数据设置式,基准点信号检测式,驱动器复位式 | |
| 高速复位 | 有 | ||
| 辅助功能 | 复位重试,移位 | ||
| 定位控制 | 直线控制 | 直线插补(4轴) 合成速度,基准轴速度 |
|
| 定距进给 | 定距进给控制(4轴) | ||
| 轴圆弧插补 | 辅助点 | ||
| 速度控制 | 速度控制(4轴) | ||
| 速度位置切换 | INC模式.ABS模式 | ||
| 位置速度切换 | INC模式 | ||
| 当前值更改 | 定位数据,当前值更改用启动编号 | ||
| NOP指令 | 有 | ||
| JUMP指令 | 有条件,无条件 | ||
| LOOP,LEND | 有 | ||
| 定位 | 块启动,条件启动,等待启动,同时启动,重复启动 | ||
| 手动控制 | JOG运行 | 有 | |
| 微动运行 | 有 | ||
| 手动脉冲器 | 可以连接1台(增量式),单位倍数(1~10000倍) | ||
| 其他控制 | 速度·转矩 | 不含位置环的速度控制,转矩控制,推压控制 | |
| 同步编码器接口 | 4CH(内置接口,经由CPU接口,经由伺服放大器接口的合计 | ||
| 内置接口 | 1CH(增量式) | ||
| 控制功能 | 速度 | 速度值.JOG速度值 | |
| 转矩 | 转矩值同一,转矩值个别 | ||
| 紧急停止 | 具有有效/无效的切换功能 | ||
| 软件行程限位 | 进给当前值的可动范围检测,进给机械值的可动范围检测 | ||
| 硬件行程限位 | 可以连接1台(增量式),单位倍数(1~10000倍) | ||
| 控制内容更改功能 | 速度更改 | 有 | |
| 超驰功能 | 1~300 | ||
| 加减速时间更改 | 有 | ||
| 转矩更改 | 有 | ||
| 目标位置更改 | 目标位置的地址,向目标位置的移动速度可以变更 | ||
| 其他功能 | M代码输出 | 有 | |
| 步进功能 | 减速单位步进.数据No.单位步 | ||
| 跳过功能 | 经由可编程控制CPU,经由外部指令信号 | ||
| 示教功能 | 有 | ||
| 参数初始化功能 | 有 | ||
| 外部输入信号设置功能 | 经由CPU.经由伺服放大器 | ||
| 色标检测功能 | 常时模式,次数模式,缓存模式 | ||
| 色标检测信号 | 4点 | ||
| 色标检测设置 | 16设定 | ||
| 驱动器之间通信功能 | 有 | ||
| SSCNET通信的断开/重新连接功能 | 有 | ||
| 数字示波功能x4 | 位数据 | 16CH | |
| 字数据 | 16CH | ||
| 任意数据监视功能 | 4点/轴 | ||
| 驱动器之间通信功能 | 有 | ||
| SSCNET通信的断开/重新连接功能 | 有 | ||
| 数字示波功能 | 位数据 | 16CH | |
| 字数据 | 16CH | ||
| 模块规格 | ||||
| 项目 | 规格 | |||
| FX5-40SSC-S | FX5-80SSC-S | |||
| 控制轴数 | 4轴 | 8轴 | ||
| 伺服放大器连接方式 | SSCNETIII/H | |||
| 总延长距离(长)[m] | 400 | 800 | ||
| 站间距离(长)[m] | 100 | |||
| 装置接口 | 经由CPU模块(Ethernet) | |||
| 手动脉冲器运行功能 | 台手动脉冲发生器 | |||
| 同步编码器运行功能 | 可以使用4台同步编码器(内置接口、经由CPU接口、经由伺服放大器接口的合计) | |||
| 输入信号(DI) | 输入点数 | 4点 | ||
| 输入方式 | 正公共端负公共端通用(光耦绝缘) | |||
| 额定输入电压/电流 | DC24V/5mA | |||
| 使用电压范围 | DC19.2~26.4V(DC24V+10/-20,脉动率5以内) | |||
| ON电压/电流 | DC17.5V以上/3.5mA以上 | |||
| OFF电压/电流 | DC7V以下/1.0mA以下 | |||
| 输入电阻 | 约6.8kΩ | |||
| 响应时间 | 4ms以下(OFF→ON,ON一OFF) | |||
| 电线尺寸 | AWG24(0.2mm2) | |||
| 紧急停止输入 信号(EMI) |
输入点数 | 1点 | ||
| 输入方式 | 正公共端负公共端通用(光耦绝缘) | |||
| 额定输入电压/电流 | DC24V/约5mA | |||
| 使用电压范围 | DC19.2~26.4VDC24V+10%/-20%,脉动率 | |||
| ON电压/电流 | DC17.5V以上/3.5mA以上 | |||
| OFF电压/电流 | DC7V以下/1.0mA以下 | |||
| 输入电阻 | 约6.8kΩ | |||
| 响应时间 | 4ms以下(OFF→ON,ON一OFF) | |||
| 电线尺寸 | AWG24(0.2mm2) | |||
| 信号输入类型 | 倍频),PULSE/SIGN | |||
| 手动脉冲器/增量同步编码器信号 | 差动输出类型 (相当于26LS31) |
输入脉冲频率 | 1Mpulse/s(4倍频后,4Mpulse/s) | |
| 脉冲宽度 | 1us以上 | |||
| 上升/下降时间 | 0.25以下 | |||
| 位相差 | 0.25以上 | |||
| 额定输入电压 | DC5.5V以下 | |||
| 高电压/低电压 | DC2.0~5.25V/DC0 | |||
| 差动电压 | ±0.2V | |||
| 电缆长度 | 30m | |||
| 电压输出/集电开路类型(DC5V) | 输入脉冲频率 | 200kpulse/s(4倍频后,800kpulse/s) | ||
| 脉冲宽度 | 5us | |||
| 上升/下降时间 | 1.2以下 | |||
| 位相差 | 1.2us以上 | |||
| 额定输入电压 | DC5.5V以下 | |||
| 高电压/低电压 | DC3.0~5.25V/2mA以下,DC0~1.0V/5mA | |||
| 电缆长度 | 10m | |||
| DC24V内部消耗电流[A] | 0.25a | |||
| 质量[kg] | 0.3 | |||
| 外形尺寸[mm] | 90.0(H)×50.0(W)×83.0(D) | |||
| 适用CPU | ||||
| 可编程控制 | FX5U.FX5UC | |||